Jawaharlal Nehru Technological University Kakinada 2009 B.Tech Mechanical Engineering Robotics - Question Paper
SET - 1
Code No: 2420307
IV B. Tech II Semester Regular Examinations, April/May 2009
ROBOTICS (Mechanical Engineering)
Time: 3 Hours Max. Marks 80
Answer any FIVE questions All questions carry equal marks
(a) What is industrial automation? Compare hard automation with soft automation. [8]
1
(b) Describe the advanced technological features and applications of modern robots? [8]
(a) Briefly describe the various robot components. [10]
2
3
(b) Define degrees of freedom. How do you calculate the degrees of freedom of a robot manipulator? [6]
(a) Find the transformation matrices for the following operations on the point 4 i + 9j -3k. i) Rotate 45o about x-axis and then translate 3 units along z-axis. ii) Translate -4 units along x-axis and rotate 60o about x-axis. [8]
(b) State and prove the properties of a rotation matrix. [8] Obtain the kinematic equations using the homogeneous transformations for the spherical arm shown in Fig. 1. [16]
4.
t
d3
revolute r 01
revolute
J2
Prismatic
Fig. 1
J3
Jl
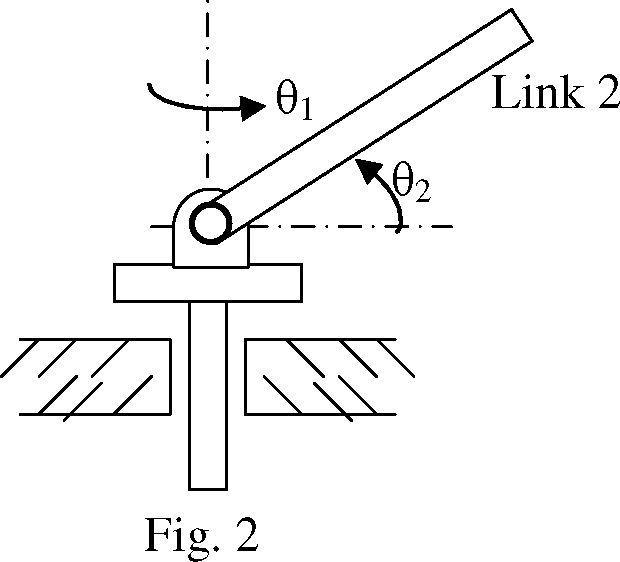
5. For the two-degree of freedom 2R manipulator shown in Fig. 2, assume that the inertia of the first moving link is negligible and that the second moving link is a slender homogeneous rod of mass m. Obtain the dynamical equations of motion by recursive Newton-Euler method. [16]
6. The trajectory of a particular joint is specified as follows: path points in degrees are 10, 40, 30, and 15. The duration of these segments should be 3, 1, and 2 seconds, respectively. The magnitude of the default acceleration at all blend points is 40 degrees/second . Calculate all the segment velocities, blend times and linear times. [16]
7. (a) Explain the following hydraulic actuators with neat sketches [8]
(i) Linear actuator (ii) rotary actuator
(b) Write about the direct-current (dc) and alternating current (ac) tachometers.[8]
8. (a) What are the features and capabilities that an industrial robot must possess to perform arc welding? (8)
(b) Discuss the applications of a robot in automated assembly operations? (10)
Code No: 2420307
IV B. Tech II Semester Regular Examinations, April/May 2009
ROBOTICS (Mechanical Engineering)
Time: 3 Hours Max. Marks 80
Answer any FIVE questions All questions carry equal marks
1. (a) Give the classification of robots by coordinate system and describe the features of each type. [8]
(b) Discuss the advantages and disadvantages of using the robots in industry.[8]
2. (a) Dicuss briefly about the grippers and give its classification. [8]
(b) Show the degrees of freedom for the following joints with the help of neat sketches [8]
(i) Prismatic joint
(ii) Revolute joint
(iii) Cylindrical joint
(iv) Spherical joint
(v) Planar joint
(vi) Screw joint
3. (a) Determine a matrix T that represents a rotation of a angle about x- axis, followed by a translation of b units of distance along the z-axis, followed by a rotation of 0 angle about the y-axis. [8] (b) Find the transformation matrices for the following operations on the point
-4 i + 8j + 5lk . i) Rotate 45o about x-axis and then translate -5 units along y-axis.
ii) Translate 7 units along y-axis and rotate 60o about x-axis. [8]
4. A spatial 3-R manipulator is shown in Fig. 1. Obtain the D-H parameters and the kinematic equations. [16]
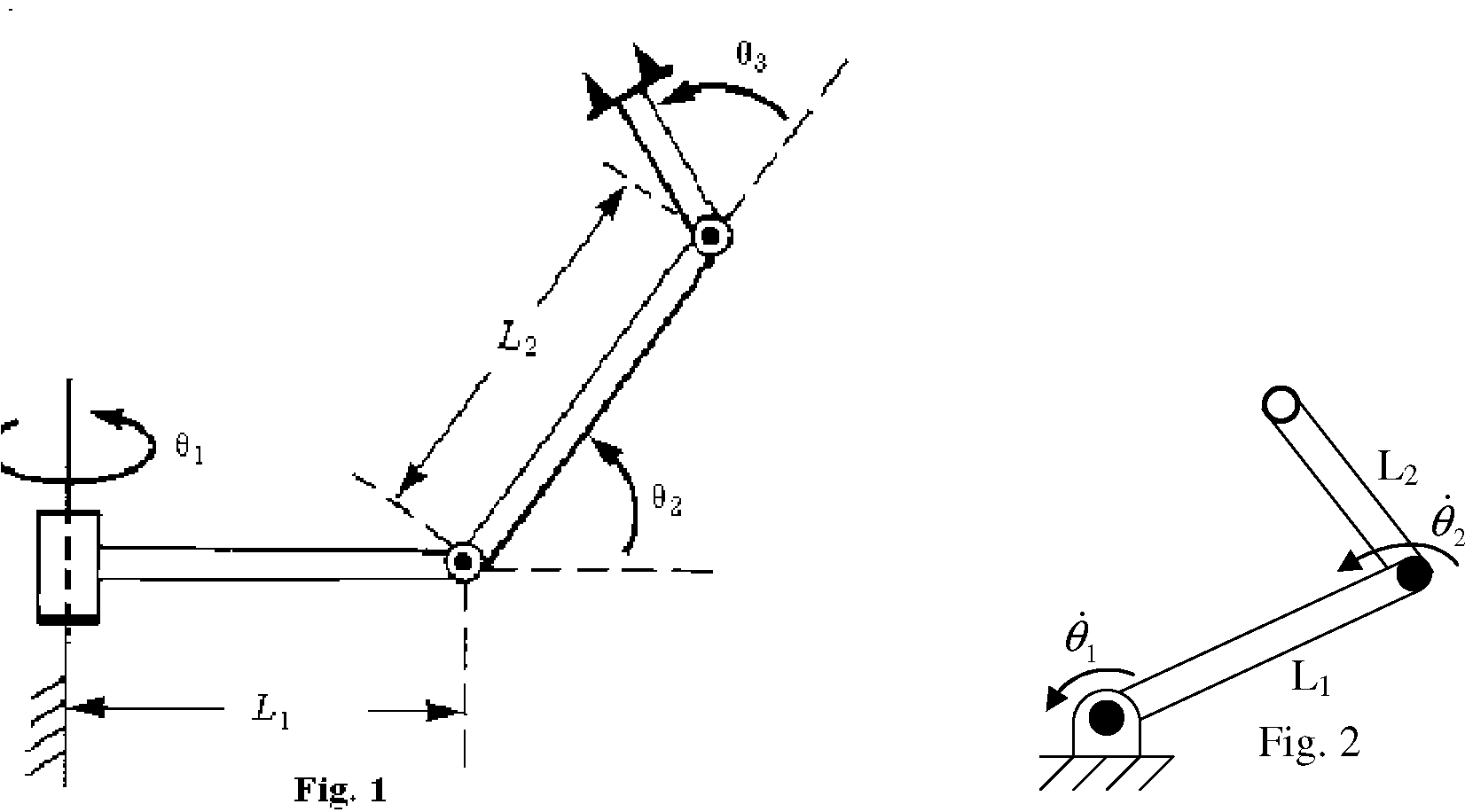
5. A two-link planar arm is shown in Fig. 2. Calculate the velocity of the tip of the arm as a function of joint rates. [16]
6. (a) Compute the time law q(t) for a joint trajectory with velocity profile of the type q (t) = a(1-cos(a t)) from q(0) = 0 to q(2) = 4. [8]
(b) The values for the joint variables are: q(0) =0, q(2) =2, q(4) =3. Compute the cubic interpolating spline with zero initial and final velocities andaccelerations.[8]
7. (a) Give a brief classification of actuators used in robots. [8]
(b) Explain the principal features of different position sensors. [8]
8. (a) What are the general considerations in robot material handling? Explain? [8]
(b) What are technical and economic problems encountered in applying robots to arc welding? [8]
Code No: 2420307
IV B. Tech II Semester Regular Examinations, April/May 2009
ROBOTICS (Mechanical Engineering)
Time: 3 Hours Max. Marks 80
Answer any FIVE questions All questions carry equal marks
1. (a) Give the classification of robots based on control system and describe their
characteristic features. [8]
(b) Describe the present day industrial applications of robots. [8]
2. (a) Explain the selection criteria of end-effectors in robotics. [8]
(b) Describe the common types of robot arms. [8]
3. (a) Determine the homogeneous transformation matrix to represent the following the sequence of operations:
(i) rotation of 45o about x-axis
(ii) translation of 6 units along x- axis
(iii) translation of -3 units along z-axis
(iv) rotation of 30o about y-axis [8]
(b) Find the rotation matrix corresponding to the set of Euler angles ZYZ and solve the inverse problem to determine the set of Euler angles corresponding to a given rotation
|
r11 |
r12 |
r13 | ||
|
matrix R = |
r21 |
r22 |
r23 |
[8] |
|
r31 |
r32 |
r33 _ |
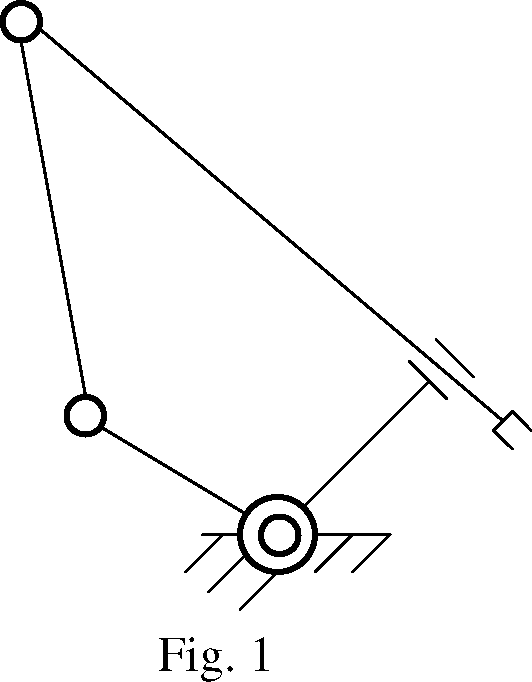
4. Find the direct kinematics equation of the four-link closed chain planar arm shown in Fig. 1. The two links connected by the prismatic joint are orthogonal to each other.[16]
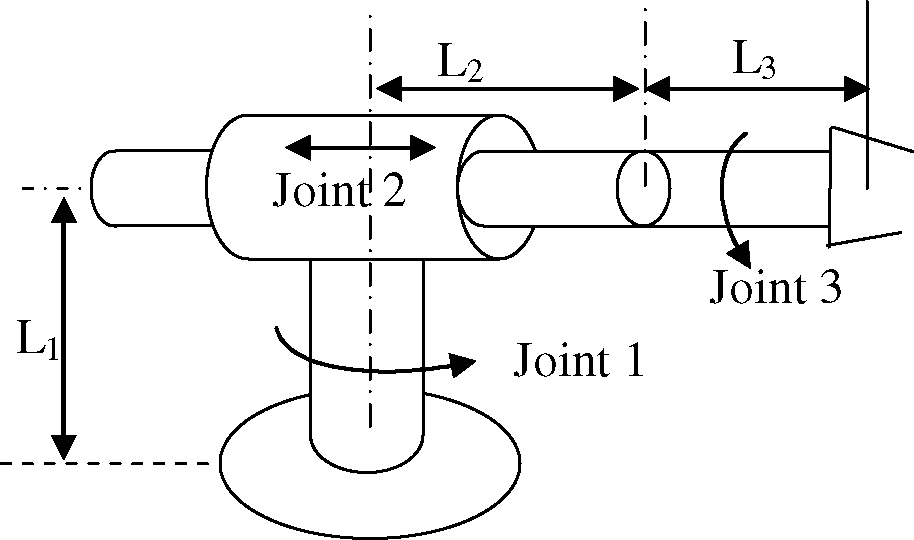
5. Determine the 3x3 jacobian that calculates linear velocity of the tool tip from the three joint rates for the manipulator shown in Fig. 2. [16]
 |
|
Fig. 2 |
6. (a) Compute the time law q(t) for a joint trajectory with velocity profile of the type
q (t) = k cos(a t) from q(0) = 0 to q(2) = 3. [8]
(b) Explain different methods used in robot programming for defining positions in space. [8]
7. (a) Explain the operating principle of stepper motor used in robots. [8]
(b) What is a resolver? Explain its operating principle. [8]
8. (a) Discuss the considerations to be made while designing for robotic assembly. [8]
(b) Explain the robotic contact arc welding sensor system? [8]
Code No: 2420307 SET - 4
IV B. Tech II Semester Regular Examinations, April/May 2009
ROBOTICS (Mechanical Engineering)
Time: 3 Hours Max. Marks 80
Answer any FIVE questions All questions carry equal marks
1. (a) Give the classification of robots by coordinate system and describe the features of
each type. [8]
(b) Describe the present day industrial applications of robots. [8]
2. (a) Describe the degrees of freedom of a robot wrist with the help of a neat sketch. [8]
(b) Describe the common types of robot arms. [8]
3. (a) Find the rotation matrix corresponding to the set of Euler angles ZYX [6]
(b) Compute the rotation matrix to represent a rotation of 90o about an arbitrary vector
a = 20 i - 15j + 20k. [6]
(c) Verify that a rotation matrix Rk that describes the elementary rotation, 0 about an axis k follows the property, Rk(-0) = Rk(0). [4]
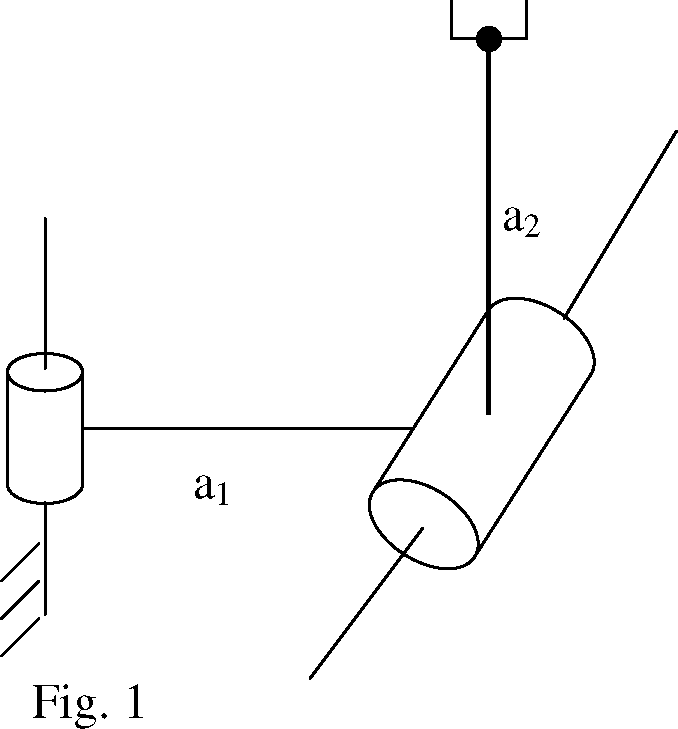
4. Solve the inverse kinematics for the two-link arm shown in fig. 1. [16]
5. (a) Find the inertia matrix of a right cylinder of homogeneous density with respect to a frame with origin at the center of mass of the body. Given the radius and the length of the cylinder as a and L. [6]
(b) Obtain expressions for the linear and angular accelerations of a link i.
[10]
6. (a) Explain the differences between robot programming and traditional programming.
[8]
2 3
(b) A single cubic trajectory is given by 9 (t) = 10 + 90 t - 40 t and is used over a time interval from t = 0 to t = 2 seconds. What are the starting and final positions, velocities and accelerations? [8]
7. (a) Explain the characteristic features of pneumatic actuators used in robots. [8]
(b) Differentiate between incremental and absolute encoders. [8]
8. (a) What are the general considerations in robot material handling? Explain? [8]
(b) Explain how robotics can be applied to inspection automation? [8]
|
Attachment: |
| Earning: Approval pending. |