Visvesvaraya Technological University (VTU) 2007 B.E Electrical and Electronics Engineering Fifth Semester inatlon,2006 - Question Paper
MODERN CONTROL THEORY
W'm 1 EE'52
| USN | ||||||||||
|
... NEW SCHEME | ||||||||||
Fifth Semester B.E. Degree Examination, July 2006 Electrical and Electronics Engineering Modern Control Theory
Time: 3 hrs.] [Max. Marks: 100
: Note: 1. Answer any FIVE full questions.
Define the concept of i) State ii) State variables iii) State space (06 Marks)
a.
b.
A temperature control system has the block diagram given in fig. 1(b). The input signal is a voltage and represents the desired temperature 0r. Find the steady-state
error of the system when 0r is a unit step function and i) D{s) = 1 ii) d{s) = 1
0.1
+ -
iii)D(s) 1 + 0.35. What is the effect of the integral term in the PI controller and the derivative term in PD controller on the steady state error? (08 Marks)
e
LX
%
200
<>02
(By*
Con.irro\
Pla.t'-dr
. Fig. 1(b) '
c. Fig. 1(c) shows the block diagram of a speed control system with state variable t feedback. The drive motor is an armature controlled de motor with armature resistance Ra, armature inductance La, motor torque constant" Kx, inertia referred to - motor shaft J, viscous friction coefficient referred to the motor shaft B, back emf constant Kb, and tachometer Kt. The applied armature voltage is controlled by a three phase fiill-converter. ec is control voltage, ea is armature voltage, er is the reference voltage corresponding to the desired speed. Taking Xi = co (speed) and X2 = ia (armature current) as the state variables, u = er as the input, and y = as the output, derive a state variable model for the feed back system. (06 Marks)
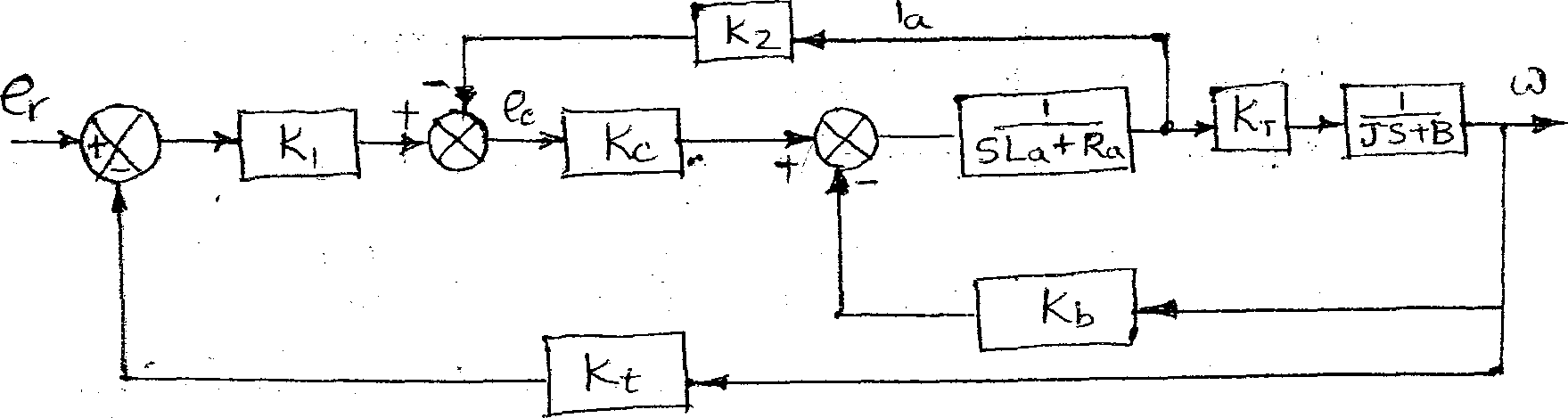
> Fig. 1(c)
2 a. For the RLC network shown in fig.2(a) write the state model in matrix notation choosing Xt(t) = Vc(t) + R;(t) and X2(t) = Vc(t) where X)(t) and X2(t) are state variables, Vc(t) is output, V(t) is input. (08 Marks)
KL L
oAaaa-- -
.
Contd... 2
Fig.2(a)
b. For a transfer function given by G(s) =
s + 35 + 2
i) Phase variable form ii) Diagonal form.
Compare classical control theory against modern control theory. State the properties of transition matrix.
|
b. Given the system X = |
|
following time response:
- write the state model in
(08 Marks) (04 Marks)
(05 Marks)
c.
a.
U . Find the input vector U(t) to give the
(10 Marks) Find the eigen value of A
|
X2{t) = 3e-3' - 2e~41 + 6(l - e~l) | ||||||||||||
|
-1 -2 0
corresponding to the vector given. (OS Marks)
The following is the state space representation of a linear system whose eigen values are -3, -2,-1.
|
1 O 0 1 |
"0" | ||
|
X = |
0 0 1 |
M+ |
0 |
|
I 1 ON 1 1 C\ i _ |
2 |
Given that u=0, X(0)=[001]T. Find X(t) " (10 Marks)
b. Find the transition matrix (pit) for a system whose system matrix is given by
5 -f
by the following techniques:
A =
3 -1
i) Laplace transform ii) Infinite series
iii) Cayley-Hamliton.
(10 Marks)
a. Define controllability and observability. (06 Marks)
b. Show that the characteristic equation and eigen values of a system matrix are invariant under linear transformation. (08 Marks)
c. State the properties of Jordan matrix. (06 Marks)
a. What are inherent nonlinearities? Explain any three of them. (06 Marks)
b. Sketch the following nonlinearities :
i) ideal relay ii) relay with dead zone iii) relay with dead zone and hysterisis
iv) relay with hysterisis v) dead zone. (04 Marks)
'
c. A linear second order servo is described by the equation C+2a>n C+co2nC - 0 where
= 0.15, con = 1 rad/sec, C(0) = 1.5 and C = 0. Determine, the singular point. Construct the phase trajectory, using the method of isoclines. (10 Marks)
Y(s) 10
a. Consider a linear system described by the transfer function W- = -w-.
u(s) s(s+\)(s+2)
Design a feedback controller with a state feedback so that closed loop poles are placed at -2,-lj 1. ' (10 Marks)
b. Consider the system described by the state model X = AX; Y = CX where -I 1
; C = [1 0]. Design a full order state observer. The desired eigen
A =
1 -2
values for the observer matrix are //, = 5 ; fi2 = -5 . (10 Marks)a. State and explain Liapunov theorems on i) asymptotic stability ii) global asymptotic stability iii) instability. (10 Marks)
b. Define singular point on a phase plane. Explain different types of singular points.
(10 Marks)|
Attachment: |
| Earning: Approval pending. |