Shivaji University 2009-5th Sem B.E Electrical Engineering T.E(Electrical)- (New ), Feedback Control Systems - Question Paper
This is 3rd year electrical engineering students fifth semester paper of 'feedback control systems' paper for the year Dec 2009.
Y,E, (Electrical) (Semester - Y) (New Coarse) Examination, 2009 FEEDBACK CONTROL SYSTEMS
Day and Date ; Thursday, 3-12-2(X)9 Total Marks; ; (X)
Time ; 1030 fi.m, to 1.30par*.
; I) Solve any three questions from Section / and any three questions from Section 11-
2) Assume suitble data wherever necessary
3) Figures to the righi indicate full marks.
SECI'fON-I
i. ?t) Obtain ihc transfer friction Hti{s}/Ejfs) for the circuit shown, in Fig.L 8
|
L> (>) | 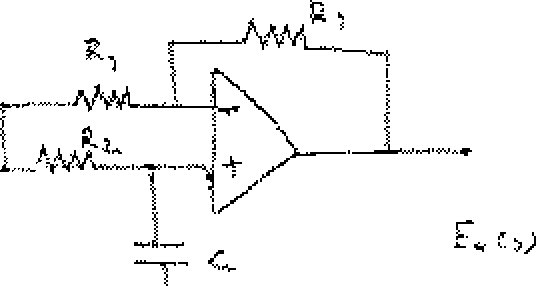 |
|
R-i | |
b) With suk&bte example sta Le anti explain Mason gaia formula for S i?.G. 8
2. Obiaia rhe uiiisferfimcEioR of a sysseni shown in fig. 2 18
i\) Deersniiic Ike values of w and y so that the max i muni overshoot i i\ unk seep response is 25% and the peak time is 2 see*.
Qs) _____
R{*>) S2 -r 2W' S -r W,,~ *
b) For a dost*] loop eorurol .systeni.
C{s) G(s)
R(s) UG(s)
Pimi
a) Sieacly s.talc error.
b) Static posit.io.n error em'iStanL k{).
c) S ta t.i c ve e oc \ y error c onss wn L k,.
a) Obuvin the iransfer ftinc&or* of field controlled D.C. scn'oechajiism.
b) Draw aneai schenrt&de of hydraulic PI controller nci obtain is.s Transfer funcdo.ii.
SECTION- II
a) Obtain the unit mr;.p response of a system defined by, j x.s j j 0 H | x, | _ j 0]
1 *2 I \ "" j s U j X i
v = !l 0 1 !
[X2j
b) For the following characteristic equation s4 r ksJt s" - s f I - 0 determine the range of k for stability
6. For a ium\ feedback closed .loop system with open loop iransfer function as
G(s)
s{s-rJ.){s2) the k1 is nor* negative Sketch the root locus pioL
7. a) The transfer .faction of a svsiein is G (s} ;;;......... Obtain the steady siase
r.., s
output > (0 if lop u? x(0 - X sin WL.
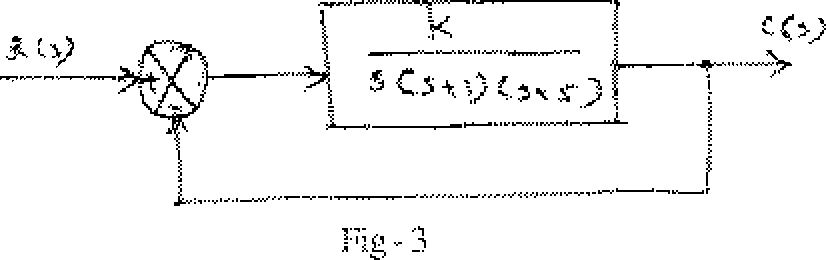
b) Obmin the phase and gain margins of a sysr.au shown In fig3 .for k - 10, arjii k-I(K). 10
S. Siace and cxpiam eomraon physical no.n-1 hiearities present in control systems. 16
|
Attachment: |
| Earning: Approval pending. |