National Institute of Technology 2007 B.Tech Chemical Engineering Process Dynamics And Control - Question Paper
Sunday, 03 February 2013 11:15Web
Page 1 of 2
6th Semester B-Tech Chemical Engineering 30th April, 2007
Process Dynamics And Control
End- Semester Exam Max Marks:100
ans the Following:
1. Consider a unity feedback control systemwith a open loop transfer function
GH(s) = K(s+3)/s(s+2)
Construct the root locus and explain on the nature of response as K varies from 0 to Infinity. (15)
2. A 1st order process with dead time has the transfer function
Gp(s) = 2e-s / (10s+1) (5s+1)
This process is to be controlled by a PI Controller. Design a PI Controller using Zeigler Nichols settings.
Gv(s) = H(s) = 1.
Determine the phase margin and the gain margin with the designed the PI Controller. (20)
3. Find the range of Kc for stability using nyquist stability criterion for the closed loop control system with the open loop transfer function. (15)
GH(s) = Kc / (2s+1) (s+1) (5s+1)
4. For the control system shown in figure 1, Determine (20)
a) C(s) / R(s).
b) C(Infinity).
c) Offset.
d) C(0.5).
e) Whether the closed loop response is Oscillatory.
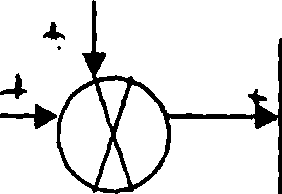
5. a) The distillation column shown in Figure.2 has the subsequent transfer model:
Y’(s) / D’(s) = 2e-20s / 95s+1
Y’(s) / F’(s) = 0.5e-30s / 60s+1
Distillate composition Y is the controlled variable. Feed flow rate F is the load variable and distillate flow rate D is the manipulated variable.
Valve and measuring elements have unity transfer functions.
i) Design a feed forward controller based on a steady state analysis.
ii) Design a feed forward controller based on dynamic analysis.
Show the block diagram representation of the feed forward control system employed here. (10)
b) Write a short note on the following: (20)
i) Distributed Control System.
ii) Dead Time Compensator.
i)Design a feed forward controller based on a steady state analysis.
ii)Design a feed forward controller based on dynamic analysis.
Show the block diagram representation of the feed forward control system employed here.
)p) Write a short note on the following
"if Distributed control system ii)Dead time compensator
|
U=0 |
 |
R=2/s
* 2
2
s(s +1)
Cow')
Fig. 1.
Distillate
Fig 2.
Bottoms
B,x
|
Attachment: |
| Earning: Approval pending. |