West Bengal Institute of Technology (WBIT) 2008-5th Sem B.Tech Computer Science and Engineering Computer Science - Control System - Question Paper
I
CS/B.TSCH [BC(0).CaBJCMO/mi-S/IB-80S/aa/(0*) 3
ENGINEERING & MANAGEMENT EXAMINATIONS, DECEMBER - 2008
Tim* : 3 Hours J [ Full Marks : 70
Graph paper and semi-log paper Is provided at the end of this booklet.
GROUP-A (Multiple Choice Type Quatlou)
1. Choose the correct alternatives for any ten of the following: 10x1 = 10
I) The mflxtmum overshoot, for an unity feedback system with open loop transfer
function G (s) - - & unit step input, is s(s+l)
a) 014 b) 015
c) 016 d) 017. I-
II) A linear time Invariant system, when subjected to an unit step input, gives a response c (t) - te~*. The transfer function of the system is
*> frTiF w
III) The characteristic equation of a system lssa + 3s + 2- 0. The system is
a) critically damped b) underdamped
c) overdamped d) none of these. 1.....I j
tv) The steady state error can be minimized by
a) increasing gain k
b) decreasing gain fc
c) decreasing oscillating frequency
d) increasing settling time. -
cs/s/ncai nim.r.wj/mii
v) The characteristic equation of a feedback control system is given by 2s4 +s3 +2S2 +5s+100. The number of roots in the right half of s-plane is
a) zero b)
1
3.
c) 2 d)
vi) Integral error control
a) increases the order of the system
b) decreases the order of the system
c) Increases steady state error
d) does not affect steady state error.
+4c(t)~3r(t).
dt
b)
d)
(s+l)(s+4) _ 4
s*+3s+5*
c)
vii) The equation governing a control system is given by 4
The transfer function for the system is
3 5
(s+l)(s+4)
1
s*+3s+4
d2c(t) 5dc(t)
viii) The settling time for a second order system responding to a step input with 5% overshoot is
4
Wn
3
Wn
2
Wn
5
Wn
a)
c)
b)
d)
|
ix) The Bode plot is obtained using a) characteristic equation b) c) closed loop transfer function d) The electrical resistance is analogous to a) viscous damper b) |
open loop transfer function over all transfer function. spring |
cm/o.nca wro.cfco/MW/iWoa/o/*)
xi) if the root locus lies only on the negative real axis, then the time response is
a) overdamped bj critically damped
c) stable d) unstable.
xil) Given that 0(5)-!. The type ofthe system is
b)
a) 1 C) 2
d) cannot be determined.
GROUP-B (Short Answer Type Questions )
3 x5 = 15
Answer any three of the following.
Find the transfer function for the block diagram shown below in figure-1.
2.
HI
Cl
a
Hi
H3
3. Apply R-H criterion to determine the stability of the system of which characteristic equation Is given by : s8 +s4 t+Ss3 +6s+4-0.
ct/awi pmMiwiwwMWW
4. Draw the electrical analog, circuit using force-voltage analogy for the mechanical system shown in figure*2.
. z.
X2
Fig.-2
Find the transfer function of the system shown in figure-3.
5.
|
VCt/ | |
|
K L | 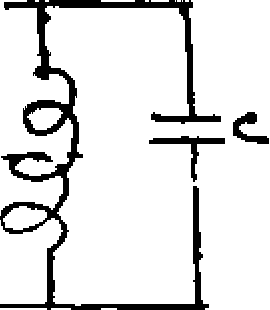 |
Fig. -3
-efficients corresponding to step, ramp & parabolic inputs.
6. Define error co
81
A unity feedback closed loop second order system has a transfer function +Q>6s+9 & It 1. excited by a step Input of 10 units. Find out Its steady state error. 3 + 2
GROUP -C [ Long Answer Type Questions)
Answer any three of the following questions.
Sketch the root locus of the system with loop transfer function
7.
OfslHfs'l-_- . Show all relevant steps.
l ) s(s+2)(sa+s+l)
CS/B.TBCa 0n(O),C8B.RB)/SIM-B/BB-BO3/Oa/(Oe) . 7
8. a) State and explain Nyquist stability criterion.
' b) The open loop transfer function of a unity negative feedback systenj is given by
5 *
. G (s) - . Draw the Nyquist diagram & hence find out whether the s(s+l)(s+2)
system is stable or not. 5+10
9. a) Sketch the Bode plot of a unity negative feedback closed loop system of which
5 (s+Q)
open loop transfer function is given by----.
s(s+3)(s+10)
Determine gain margin, phase margin, gain cross-over frequency & phase crossover frequency.
b) Comment on the stability of the system. 8 + 5 + 2
16
10. a) A second order system has the following transfer function : G (s)--. It is
s(s+6)
connected with a unity feedback arrangement.
Evaluate i) Wn, ii) g, iii) Wd, iv) tpand v) % Mp of the closed loop system.
'' ' ' *2 'V
b) Find the steady state error of the system for input r(t)-l+t+by static error co-
2
efficient method. 10 + 5
11. Write short notes on any three of the following : 3x5
a) PID controller ;
b) Servomotors
c) Polar plots
d) Speed control of D.C. motor using feedback.
END
|
Attachment: |
| Earning: Approval pending. |