University of Mumbai 2007-1st Sem M.E Mechanical Engineering Machine Design and Vibration - - Question Paper
M.P'ZC Me.oh-) T*ic ryui'f c*nj_ p jj) c
\
Con. 5854-07.
[Total Marks : 100
(4 Hours)
N.H. > (1) Question No. I Is compulsory.
It# fo 51
(2) Answer any four questions from (he rent.
QI *<a) Derive the equation: a*Yz * a*yi+R+2<xVKy, + u>xp+<&x(<oxp)
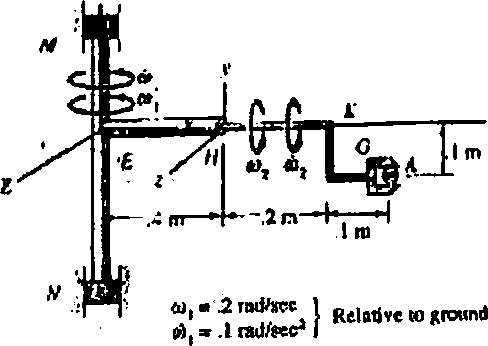
(b) A platform is rotating with a constant speed of 10 rad/sec relative x> the ground A shaft is mounted on the platform and rotates relative to the platform ara speed a>2 of 5 rad/sec. What is the angular velocity of the shaft relative to the ground? What are the first and second time derivatives of the angular, velocity of che'shaft relative to the ground? as shown in fig.1
10
H
|
.jf, | |
|
! f 1 | |
|
* |
f. 1 \ |
Q2. (a) A robot moves a body held by Its "jaws" G as shown in the diagram 2. What is the velocity and acceleration of point at the instant shown relative to the ground? Arm BH is welded to die vertical
10
shaft MN. Arm HKG is one rigid member which rotates about BH.
 |
|
Relive EH |
(b) Derive the Eulars Equation of motion.
10
|
Q3 (a) Fifid Iw and ly*. The diameter of A is 0.3 m. B is the centre of the right face of the block. Take P*P kg/m3 (see fig.3) 10 |
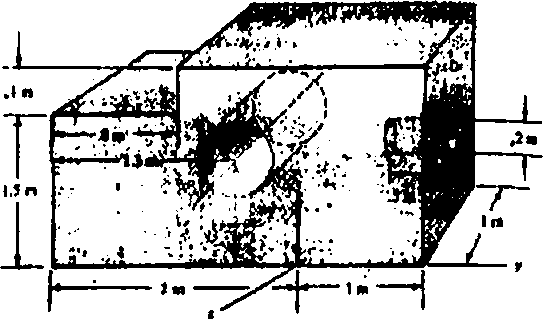 |
Con. 5a54-6Brr8718-j07., j ,1 ' -2, ..: j
lkgitc rotates with speed o>i 3ra3sec relative to rod AB . Rod AB rotates with speed <j)j 4 rad/sec relative to vertical shaft, which rolaces with spoed a = 2 rad/sec relative to.the.
' ground. What is die torque coming onto the bearings At B due to the the motion at a time when
68
0 ? 60.? Take 1 j * 013 * 0. (sec fig. 4) 10

Q4. (a) Explain Bigen value problem to find out natural frequency and mode shape*
(b) Determine the natural frequencies and the mode shape vectors of the system showr in fig.3. 12
jg?
* *
M?
f-VW ** fj/w} -Ahr %mminnmimmrmmtfntfi0viMmr% wyynm inaawn.
Q5 (a) Explain stiffness influence coefficient matrix and flexibility mam*.
06
(b) Three machines arc equally spaccU along the span of a simply supported beam of elastic
moiuluj E and maw moment of iuenia 1 Determine the flexibility matrix for a 3-JXJF model of ihe&ystem as shown in fig.6. 14
The deflection of a particle a distance 1 along the ueutial axis of a simply supported beam, measured from the left support, due to a concentrated unit load applied a distance a from the left support is r,e -1
Q6. (a) Use the free body diagram method and Lagrange's equaiion to derive the differential equations governing the motion of the system of ftg.7., using xi,xiand xj.as generalized coordinates. 10
p/VV
-WAr
1* -AAr
T-wv|
(b) With necessary sketches and deriving necessary expressions explain the working principle of Dynamic Vibration Absorber. Also explain why undamped dynamic absorber is net effective if operating speed is not fairly constant. 1 10
Q7 (a) Explain principle of Holder's method for solving muitidegree of freedom of free vibration problem.
BS
fb) A 150 kg sewing machine operates at 1200 r/mln and has a rotating unbalance of 0.45 kg-m. f i) wiurt is the maximum stiffness of an undamped isolator socb that the force transmitted to the machine's foundation is less than 2000 N? - 05
(ii) Deign an isolator by specifying k and $ such that die maximum itan-up amplitude is 30 ram <utd ihe maximum transmitted force is 3000 N. 05
(iii) Whal, if any, mass should be added to the machine to limit its steady-state amplitude to 3 mm?
05
|
Attachment: |
| Earning: Approval pending. |