University of Mumbai 2008-8th Sem B.E Electrical and Electronics Engineering Industrial Controllers - Question Paper
Industrial Controllers Sem VIII May 2008
13*t C&Uxkkc*) 3)3211 ~3ncJ-uWmJ
(REVISED COURSE)
ll/tr
576: D*1stHfOB.
CO-4030
Con. 2988*08.
(3 Hours)
|
[ Total Marks : 100 |
 |
N.B. (1) Question No. 1 is compulsory.
(2) Attempt any four questions from the rest.
(3) All questions carry equal marks.
(4) Assume suitable data wherever necessary.
1. Solve the following :
20
(a) Explain the Proportional band and derive the expression for the same.
(b) Explain the scan cycle of PLC.
(c) Explain the quarter amplitude tunning for PID controller.
(d) Open loop gain of a unity feedback control system is G(s) = Q + determine
the controller gain being a proportional controller to move the time constant to a sixth of its open loop value.
2. (a) Explain the trade-offs between Relays and PLCs for control applications. 10 (b) Explain the windup effect and hence explain the ant windup circuit. 10
3. (a) Explain the industrial PID controller structure. 10 (b) Explain the ON time delay timer instruction with timing diagram. 10
4. (a) Explain the pole placement tunning of PID controller. 10 (b) Draw and explain the wiring diagrams of output modules to output devices. 10
5. (a) Explain the implementation of derivative term in the controller. 10 (b) Explain In details the logical instruction used in PLC. 10
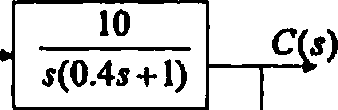
6. (a) The rate feedback system avoids the problem of zero on the numerator caused by 10
using PD controller
(i) Calculate the closed loop transfer function for the system below. Explain the difference In the transfer function.
(ii) Choose the values of Kp and Kd and K, and Kg to meet the following requirement :
damping ratio = 0-7, and = 2 rad/sec.
[TURN OVER
30-08. Uo 02 fo-wWU/A %
417 j D-Utwoe,
Con. 2988-CO-403(M)8.


(04*+!)
(b) Develop a ladder logic for a conveyor is run by switching on or off a motor. We are 20 positioning parts on the conveyor with an optical detector. When the optical sensor goes on, we want to wait 1*5 seconds, and then stop the conveyor. After a delay of
2 seconds the conveyor will start again. We need to use a start and stop button -a light should be on when the system is active. Gages have been attached that indicate good or bad. If the part is goodr it continues on. If the part is bad, we do not want to delay for 2 seconds, but instead actuate a pneumatic cylinder.
7. Solve the following (any three) : 20
(a) Develop and explain ladder logic that will flash a light once every one second.
(b) (i) Write the given interacting PID controller in standard decoupled text book
form.
 |
|
(ii) Write the given interacting PID controller in industrial time constant-gain form. |

(c) Digital PID controller. *
(d) Time domain PID controller.
|
Attachment: |
| Earning: Approval pending. |