Osmania University (OU) 2006-1st Sem B.E Electronics & Tele-Communication Engineering 3/4 (E.C.E)(ESTER)SUPPLEMENTARY ,IL, Automatic control systems - Question Paper
B.E 3/4 (E.C.E)(I-SEMESTER)SUPPLEMENTARY EXAMINATION,APRIL,2006
Automatic control systems
Code No.: 10296
FACUI/Tlf OP EIfGINEERING B.E. Wi/TV Year (ECE) I Semester (Supplementary) Examination, May 2006
AUTOMATIC CONTROL SYSTEMS Time : 3 Hours] [Max. Marks : 75
Answer all questions from Part A and any five questions from Part B.
Part A - (Marks : 25)
1. Construct the signal flow graph of the following set of simultaneous equations making y4 as output node.
y2 *21+ V?
V s: t V+tV+t V 2 3 *-311 32"2 333
3
2. Define order and type of a system. 2
3. Calculate the steady state error of type O system having unit step displacement
.. . . . .. . i .
input and position error constant of . 3
iy
4. Write the formula to find out the value of K at any point on the root locus. 2
5. Obtain the transfer function of a FID controller. 2
6. Define phase margin and gain margin w.r.t. Bode plot. 3
7. What are the advantages and disadvantages of digital control systems? 2
8. Derive the transfer function of lag-leadnetwork and mention its applications. 3
9. Define : (a) State space (b) State vector 2
10. Explain briefly about observability and the related test to find out observability. 3
Part B - {Marks : 5 x 10 = 50)
11. (a) Explain briefly about Masons Gain formula. 2
(b) Draw the classical and mobility analogies of the mechanical system shown in fig. Also write the equilibrium equations of the mechanical system. 8
y2(t)
-RS55&-
B
f'PiO f. .oy. 2
12. (a) Determine the range 5htQJW4 iig to be stable.
10296
5
Mfesmsg i {ao&iy vi.-.in hr:~r">CM
K
(b) For unity feedback system having G{s) = --, find steady sta
' r*vli urn mu'. /. Seffcrt*S){j5M* 2) -
for unit step position, unit ramp and unit acceleration inputs. Also obtain generalised error coefficients ami #rite the iror series. 5
state errors
:i; i>i II xn-ilii':; !}>:; ,J'"? v'iUUVIHP Iv? -
-V
13. (a) Sketch the Nyquist plot for GH{s) =
P , P > 0 and finjd stability.5
(b) Mention various advantages for investigating the system performance in frequency domain than time domain. 5
14. For the sampled data system shown in fig, find out the response to unit step input.
1 ' '
: :WitfvGte) =
10
s + 1 R(t)
........... | .........j........ Q($)
r. c)
T=tsec.
ffSrrf.....r
rHoq vs
15. A system is characterised by ti"> transfer function'
.Find
u.(s) s3 +6s2 +1 is + 6 the state and output equations fri matrix fcrrfr 6tttr6flability and
; observability I;-Vrt low;:;- i> !<;.;< M V, bnfs 10
16. (a) Define pJb.as<? ij-jglfid gain pgM Nyquist plot 4
(b) Obtain the transfer function of the system whose magnitu; V$.frequency ,
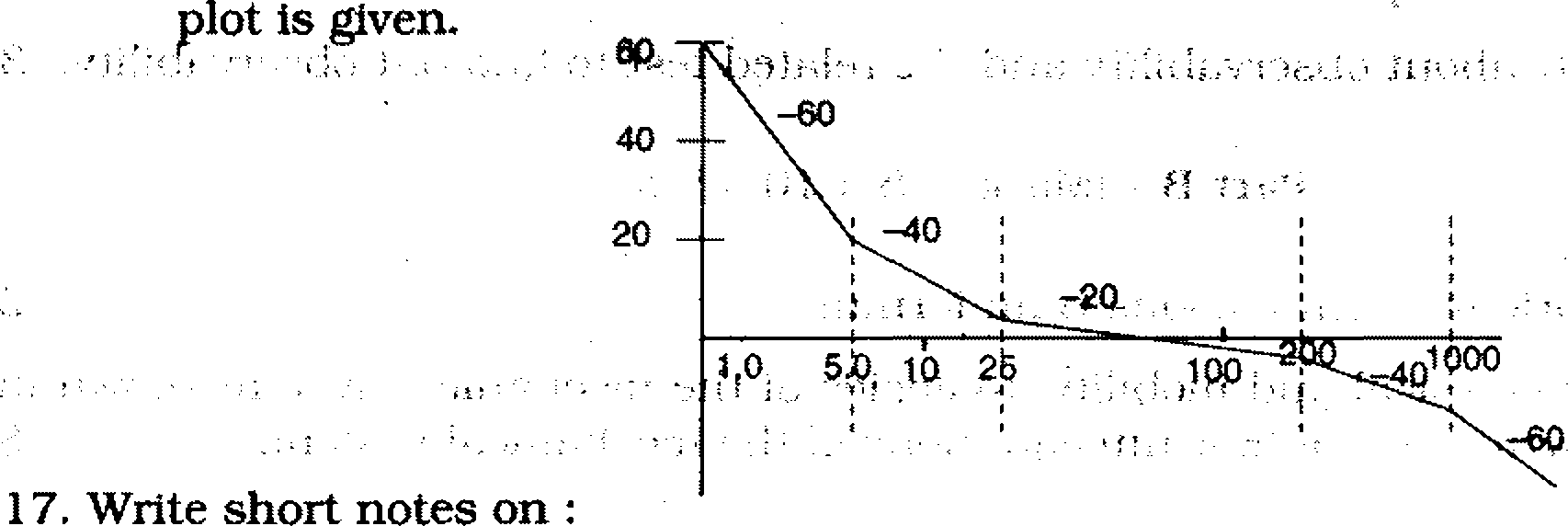
(a) Error sensing devices
(b) PID controller
- ---
10
, (c) Observability.
|
Attachment: |
| Earning: Approval pending. |