Cochin University of Science and Techology (CUST) 2005-6th Sem B.Tech Mechanical Engineering ,, Instrumentation Theory And Control Engineering - Question Paper
November 2005
ME 603 INSTRUMENTATION THEORY AND CONTROL ENGINEERING
( 2002 Admissions)
Time : 3 Hours Maximum Marks: 100
I. (a) Which are the three categories of error in measuring systems? A 600 V voltmeter is
specified to be accurate within 2% of full scale. Calculate the limiting error when the instrument is used to measure 250V. (12)
(b) What do you mean by order of an instrument in the mathematical modeling? Define
time constant and static sensitivity of a first order instrument. (8)
OR
II. (a) Differentiate between accuracy and precision. (6)
(b) Develop the mathematical model for a second order system and discuss on its step
response with the help of relevant plots and equations. (14)
III. (a) Mention the advantages of semiconductor strain gauges over the others. (6)
(b) A resistance strain gauge with a gauge factor 2 is cemented to a steel member, which is subjected to a strain IjcIO-6 . If the original resistance value of the gauge is 130f2 , calculate the change in resistance. (6)
(c) Explain the working principle and application of a scintillation counter. (8)
OR
IV. (a) Explain the working principle of a sound level meter. (6)
(b) Explain any one type of torque measuring technique. (6)
(c) Derive the transfer function of the mechanical system shown below. (8)
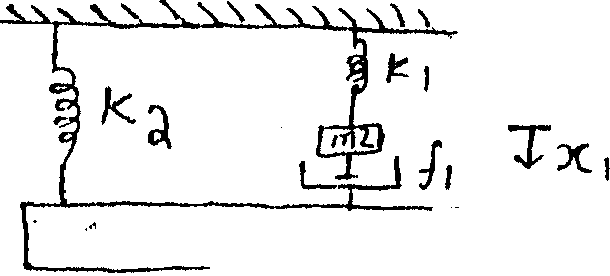
(8)
V. (a) Derive the transfer function of the closed loop system given below.
(b) Write short note on ORSAT apparatus.
(c) Explain robot arm system with the aid of a suitable diagram. (6)
OR
Obtain the state space representation of the RLC network shown below.
VI. (a)

(b) The closed loop transfer function of a system is given by
C(*) 7 R{s) S* +4.5 + 5
Determine
(i) the dancing ration
(ii) natural frequency
(iii) step response and
(iv) error response
(12)
VII. (a) Using Hurwitz approach, verify the stability of S* + 4S3 + 9s2 + Ss+2 = 0 (b) Determine the value of K for the below system to be stable
(8)
(12)
OR
VIII (a) By sketching Bode plot, discuss the stability of the unity feed back
system, G(s)=-- (12)
s(s + 2)(s + 5)
(b) What is a Liapunove function? How it is being developed? Explain how it can be used
in stability analysis of systems. (8)
IX. (a) Write short notes on,
(i) Pneumatic controllers (ii) Servo motors
(iii) Synchros (iv) Integral control action (5x4=20)
OR
X. (a) What are the advantages and limitations of derivative control action compared to others? (8)
(b) Derive the transfer function of an armature controlled DC servomotor and explain. (12)
***
|
Attachment: |
| Earning: Approval pending. |