Uttar Pradesh Technical University (UPTU) 2007 B.Tech Automatic control - Question Paper
Printed Pages : 4 ME-605
(Following Paper ID and Roll No. to be filled in your Answer Book)
Roll No.
PAPER ID : 4053
Printed Pages : 4 ME-605
B. Tech.
(SEM. VI) EXAMINATION, 2007 AUTOMATIC CONTROLS
[Total Marks : 50
Time : 2 Hours]
Note : Attempts all questions.
Attempt any four of the followings : 3.5x4
(a) List out merits and demerits of open loop control systems.
(b) Draw a schematic diagram of a PID controller and also draw a graph showing the output of the PID controller for a unit ramp input.
(c) Find the inverse Laplace transform of
f(s) = 7~\ir\
(s + l) (s + 2)
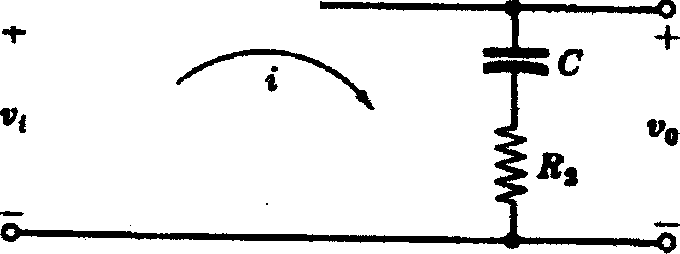
(d) Determine the transfer function of the R-C network shown below (where Y is the input voltage):
|
-WWA |
 |
 |
|
Fig. 2 |
(1) Find the transfer function, between the input (x ) at point P and output (x ) of the position of the mass, of the given mechanical system.
m
Fig. 3
Attempt any four of the following : 3x4
(a) Determine the unit-ramp response of the first-order system shown below:-
C(s)
R(s)
Ts
Determine the values of K and k of the closed-loop system shown below, so that the maximum overshoot in unit-step response is 25% and the peak time in 2 sec. Assume that J= 1 Kg-m2.
(b)
 |
|
Fig. 5 Briefly discuss about the step response of a second - order system for the three different cases: under damped (0< E, <1), critically damped ( = 1) and over damped ( E, > 1). Draw a block diagram of an industrial control system, which consists of an automatic controller, an actuator, a plant (consisting of physical objects like a mechanical device etc.) and a sensor (measuring element). Briefly explain the functions of each element of the block diagram. A proportional-plus-derivative controller is used to control a system consisting of an inertial load as shown in the figure below. Find the steady state error for a unit-ramp |
(c)
(d)
(e)
|
K + Kjs |
1 | |
|
i(/j + B) |
Fig. 6
3
(f) Briefly discuss the effects of integral and derivative control actions on system performance.
3 Attempt any two of the following :
(a) The characteristic equation of a given system is :
s4 + 6 s3 + 11 s2 + 65 +K = 0
Using the Routh stability criterion, determine the range of K for which the system will be stable.
(b) Discuss the functioning of a hydraulic proportional controller.
(c) Draw a neat sketch and explain the basic principle for obtaining a pneumatic proportional-plus-derivative controller.
6x2
Attempt any two of the following :
(a) For the control system given by
G(s) = k(s+2) / (s2 + 2s + 3) and H(s)=l
Find the following:
(i) The root loci on the real axis
(ii) The angle of departure
(iii) The break in point
(b) Draw the Bode diagram of the following transfer function (L=0.5 and T=l)
p-jL
G(jco) = -
V ' 1 + jaT
(c) Sketch a polar plot of the second-order transfer function given by :
G(s) = v ' s(Ts +1)
V-4053] 4 [ 1390 ]
|
Attachment: |
| Earning: Approval pending. |