Birla Institute of Technology (BIT Mesra) 2007 B.E CONTROL SYSTEMS - Question Paper
PLEASE CHECK THE ATTACHMENT...
BIRLA INSTITUTE OF TECHNOLOGY & SCIENCE, PILANI (RAJASTHAN)
FIRST SEMESTER 2007-2008
|
AAOC C321 Control Systems Comprehensive Examination (Closed Book) Part- A and B | |||
|
Date 08-12- |
2007 |
Total Time: 3 Hrs |
Max Marks: 120 |
|
Time: 1 Hr. |
Part- A |
Maximum Marks: 30 | |
|
NOTE: |
0) (ii) (iii) |
Number of questions: 22 Number of blanks : 30 Each blank carries one mark. | |
|
Name: |
ID No: |
Sec. No. |
Q.l Lumped parameters are characterized by_ (differential eqs. /
partial differential eqs.)
d x dx r~
Q.2 System described by equation Y= - +--1- 7vx , where X is input and Y is output is
dt" dt
a_system ( Non linear/linear and Time variant/invariant).
Q.3 In an ideal position control servo mechanism, back emf constant is numerically equal to_constant.
Q.4 For a unity negative feedback system, forward path gain is K/(s+9). Sensitivity of the system, n case of open loop and closed loop to small changes in K (K = 0.4) at (0= 1 rad/s is_and_respectively.
Q.5 In Q.4, if required time constant for closed loop system is 10 ms then the value of K and corresponding steady state gain is_and_respectively.
Q.6 If a first order system works in open loop mode, its steady state gain and the speed of response is_and_respectively, as compared to closed loop mode.
Q.7 A 6-stack stepper motor has _ numbers of teeth if the angular displacement
between stacks of stator teeth is 4 (assuming, stack rotor teeth aligns with its stator).
Q.8 In Synchro transmitter, at some position of its rotor, the voltage in one coil is maximum while across other two is zero, this position of the rotor is known as
_and the same name is given to the control transformer
rotor position if the rotors of synchro pair are at_ .
Q.9 The Hydraulic actuator will work as an ideal integrator if leakage and _flow are negligible, (compressible/turbulent)
Q.10 For the same horse power, hydraulic actuators are_than electrical
motors, (lighter/heavier) PTO
Q.ll Out of Pneumatic and hydraulic systems, which one has shorter response time?
.damped step response of a second order system oscillates with
Q.12 The
constant frequency and magnitude.
Q.13 The response of a system for step input of 4 unit is (l-e*4t)t u(t). If this system is
-5t
excited by a input of e" u(t), the steady state value of the response is.
Q.14 The addition of only a zero in the closed loop transfer function results in .rise time and_peak over shoot.
|
R(s) Fig Q. 15 | 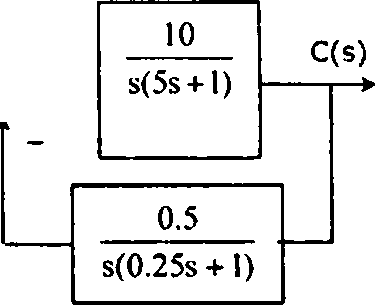 |
Q.15 For the system shown in Fig Q. 15, value of
position error coefficient is_and
acceleration error coefficient is_.
Q.16 The open loop transfer function of a negative feedback system is K/ [(s+l)(s+3)]. The range of K for which system exhibits the overdamped response, is_.
Q.17 The characteristic equation of a negative feedback system is s3+ 4s2+5s+K=0. The range of K for system to be stable is_.
Q.18 For a system to be stable, the gain at phase cross-over frequency should be less than _db.
Q.19 The transfer function of a compensation network is (s+5)/(s+0.5), this represents a _network, (lead/lag)
Q.20 The maximum phase lead required from a lead network is 30. The value of a (or a)
is_. - 0.4
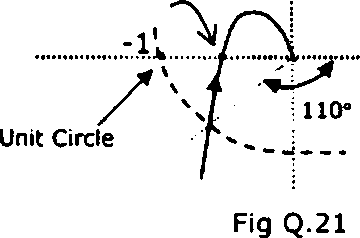
Q.21 The frequency plot of a system is given in Fig Q.21.
The gain margin is_db and phase margin
is_.
Q.22 In a compensation network, the zero location is at -0.5 and at dc frequency the network provides an attenuation of 14 db. The location of compensatory pole is
_and the frequency, at which it provides maximum phase lead
is_rad/s.
Birla Institute of Technology and Science, Pilani
First Semester 2007-2008
AAOC C321: Control Systems Comprehensive Examination (Part B)
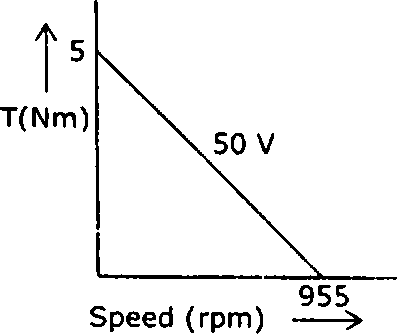
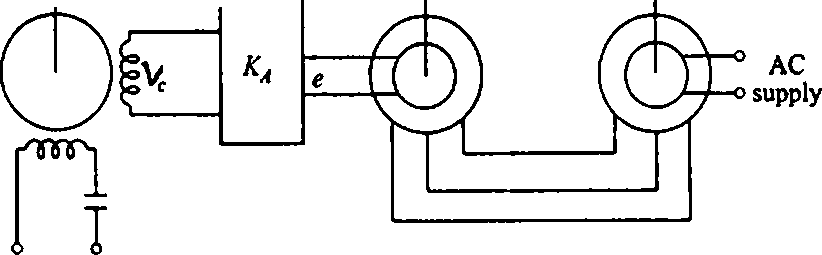
Q.l Position of a camera is to be controlled as shown in Fig Q.l (a). The camera is driven by an ac servo motor through a gear train and is designed to follow the movement of the spotting scope. The two phase servo motor develops a torque in accordance with the
equation Tm= KjVc-KiCOm and its torque-speed characteristic is shown in Fig Q.l (b).The various parameters of this system are given below:
Sensitivity of the synchro error detector (Ks) is 30 V/rad, Amplifier gain (KA) is 20 V/V,
Nj/ N2 = 3/2, Moment of inertia of camera (JL) =1 kg-m2;
Friction coefficient of camera (BL) =4 Nm/rad/s. Moment of inertia and friction coefficient of motor are negligible.
For this system:
(i) Draw the block diagram
(ii) Determine the transfer function 0L(s)/ 0R(s).
(iii) Determine the magnitude of sudden input that is required to achieve a final position of 5 of the camera. [20]
 |
|
Hg. Q. l(b) |
|
Camera |  |

|
Spotting r scope r---(\ |
 |
|
AC supply |
irrr-
Ny
Q.2 Sketch the Nyquist plot for a system whose open loop transfer function is K(1 + 0.5s )(s + 1) u
/i TTTw I,' choosing the appropriate Nyquist contour. Determine the range of (I + !Us)(s - I) *
K for which the closed loop system is stable. [201
PTO
(a) write the governing differential equations
draw the signal flow graph and therefrom determine the transfer function
(b)
AQo(s)
using Mason's gain formula. Capacity of tanks are Ci and C2 respectively.
AQd(s)
Q+AQ,=T|
ft
H+AH
-1
q+aq, I fr-
AQd
Q+AQ(
H+AH z
Rj
s:
f , K.(s + 15)
For a unity negative feedback system, the open loop transfer function is-.
s(s + 2)
(a) draw the neat sketch of root locus for this system, on the answer sheet, showing all the necessary steps.
(b) time domain specifications for this system are given below:
> The maximum allowable peak overshot is 4.32%
> The maximum allowable settling time for 2% tolerance band Is 800 ms
> It should not exhibit overdamped response.
(i) determine the range of K and show this on the root locus
(ii) determine the value of steady state error for ramp Input of 5 units (K=4).
For the system, whose block diagram is shown below, draw the Bode's magnitude (asymptotic) and phase plot on the semi-log graph sheet provided and therefrom find:
C(s)
R(s)
O
s(s +2s + 4)
|
K | |
(a) the value of K for system to be just unstable
(b) the value of K if the required gain margin is 6 db and for this value of K also find
the Phase Margin of the system and comment on the system stability. [20]
|
Attachment: |
| Earning: Approval pending. |