Birla Institute of Technology (BIT Mesra) 2007 B.E Real-Time System - Question Paper
BIRLA INSTITUTE OF TECHNOLOGY AND SCIENCE, PILANI
FIRST SEMESTER 2007-2008
BITS G553 Real-Time System
Comprehensive exam
MM: 40
Weightage: 40%
Time: three Hrs Open Book Date: 06-12-2007
Symbols and data format have usual meaning. State any assumption made clearly.
Q 1. ans the subsequent ques. in short and to the point.
a) The statement “Under the OCC-broadcast Protocol used in concurrency control in real-time
database, once a transition reaches the validation phase, it is guaranteed commitment” is actual
or false? Justify your ans.
b) Compare real-time software versus conventional software.
c) The design of critical real-time systems involves 2 independent sets of requirements:
functional requirements and safety requirements. What will you consider in safety
requirements?
d) What special issues do pipelined architectures pose for real-time system designers?
Are they any various from non-real-time systems?
e) What is the difference ranging from a task dispatching mechanism and a scheduling policy?
(5x2)
Q two Consider the tasks T1(10, 2), T2(14, 2), T3(50, 1), T4(24, 3) and T5(15, 3), these are to be
scheduled using fixed priority scheduling algorithm such as RMA.
a) presume that every situation switch takes 0.1 units of time. What is the time demand function for
tasks T3,T4,T5? Are these tasks schedulable?
b) The interval ranging from clock interrupts is 1, handling 1 takes 0.1 units of time in any case and
additionally 0.05 for every pending jobs. replace the time demand function of task T5 of the
previous part to take these into account when the scheduling is done in clock interrupts.
Is task T5 schedulable based on this time demand function?
(5+3)
Q three A system contains 3 periodic tasks T1(10,2), T2(15,4) and T3(21,3) and 1 deferrable
server whose period is 18. (Use RMA)
a) What maximum budget the server may have, so that the system is schedulable?
b) If the server period is 12, compare the budgets in both cases. Comment on the outcome.
(2+2)
Q four Consider the subsequent 4 task system under RM-scheduling: T1 (9, 4.5, [X; 3]),
T2 (30, 7.5, [Y; 1.5]), T3 (300, 7.5, [X; 4.5 [Z; 1.5]]), T4 (315, 9, [Z; 7.5 [Y; 6]]).
(X, Y, Z are resources.)
a) Are the tasks schedulable using the NPCS protocol? Justify your answer!
b) Are the tasks schedulable using the priority ceiling protocol? Justify your answer!
(3+5)
Q five A factory is setting up an automatic delivery system, where robots move along the corridors
bringing goods. A real-time control system is to be designed that drives the robot(s) along the
corridors as defined in the subsequent figure.
.
P. T. O.
The corridors are divided into 7 sectors. Sector three can be crossed in 2 directions 2-3-4 and
7-3-1. From sector four to sector seven the robot can pass either through five or 6.
a) Model the issue of a single robot with a Petri net and define in detail every place and
transition represented.
b) Now presume that there are 2 robots. Specify a Petri net such that only 1 robot can access
sector three at a time.
Draw only 1 diagram in every case and only three entries in every firing table.
(3+2+5)
1
2
5
4
7
6
3
BIRLA INSTITUTE OF TECHNOLOGY AND SCIENCE, PILANI FIRST SEMESTER 2007-2008 BITS G553 Real-Time System Comprehensive Examination
MM: 40
Weightage: 40%
Time: 3 Hrs Open Book Date: 06-12-2007
Symbols and data format have usual meaning. State any assumption made clearly.
Q 1. Answer the following questions in short and to the point.
a) The statement Under the OCC-broadcast Protocol used in concurrency control in real-time database, once a transition reaches the validation phase, it is guaranteed commitment is true or false? Justify your answer.
b) Compare real-time software versus conventional software.
c) The design of critical real-time systems involves two independent sets of requirements: functional requirements and safety requirements. What will you consider in safety requirements?
d) What special problems do pipelined architectures pose for real-time system designers?
Are they any different from non-real-time systems?
e) What is the difference between a task dispatching mechanism and a scheduling policy?
(5x2)
Q 2 Consider the tasks T1(10, 2), T2(14, 2), T3(50, 1), T4(24, 3) and T5(15, 3), these are to be
scheduled using fixed priority scheduling algorithm such as RMA.
a) Assume that each context switch takes 0.1 units of time. What is the time demand function for tasks T3,T4,T5? Are these tasks schedulable?
b) The interval between clock interrupts is 1, handling one takes 0.1 units of time in any case and additionally 0.05 for each pending jobs. Modify the time demand function of task T5 of the previous part to take these into account when the scheduling is done in clock interrupts.
Is task T5 schedulable based on this time demand function?
(5+3)
Q 3 A system contains three periodic tasks Ti(10,2), T2(15,4) and T3(21,3) and one deferrable server whose period is 18. (Use RMA)
a) What maximum budget the server may have, so that the system is schedulable?
b) If the server period is 12, compare the budgets in both cases. Comment on the result.
(2+2)
Q 4 Consider the following four task system under RM-scheduling: T1 (9, 4.5, [X; 3]),
T2 (30, 7.5, [Y; 1.5]), T3 (300, 7.5, [X; 4.5 [Z; 1.5]]), T4 (315, 9, [Z; 7.5 [Y; 6]]).
(X, Y, Z are resources.)
a) Are the tasks schedulable using the NPCS protocol? Justify your answer!
b) Are the tasks schedulable using the priority ceiling protocol? Justify your answer!
(3+5)
Q 5 A factory is setting up an automatic delivery system, where robots move along the corridors bringing goods. A real-time control system is to be designed that drives the robot(s) along the corridors as described in the following figure.
P. T. O.
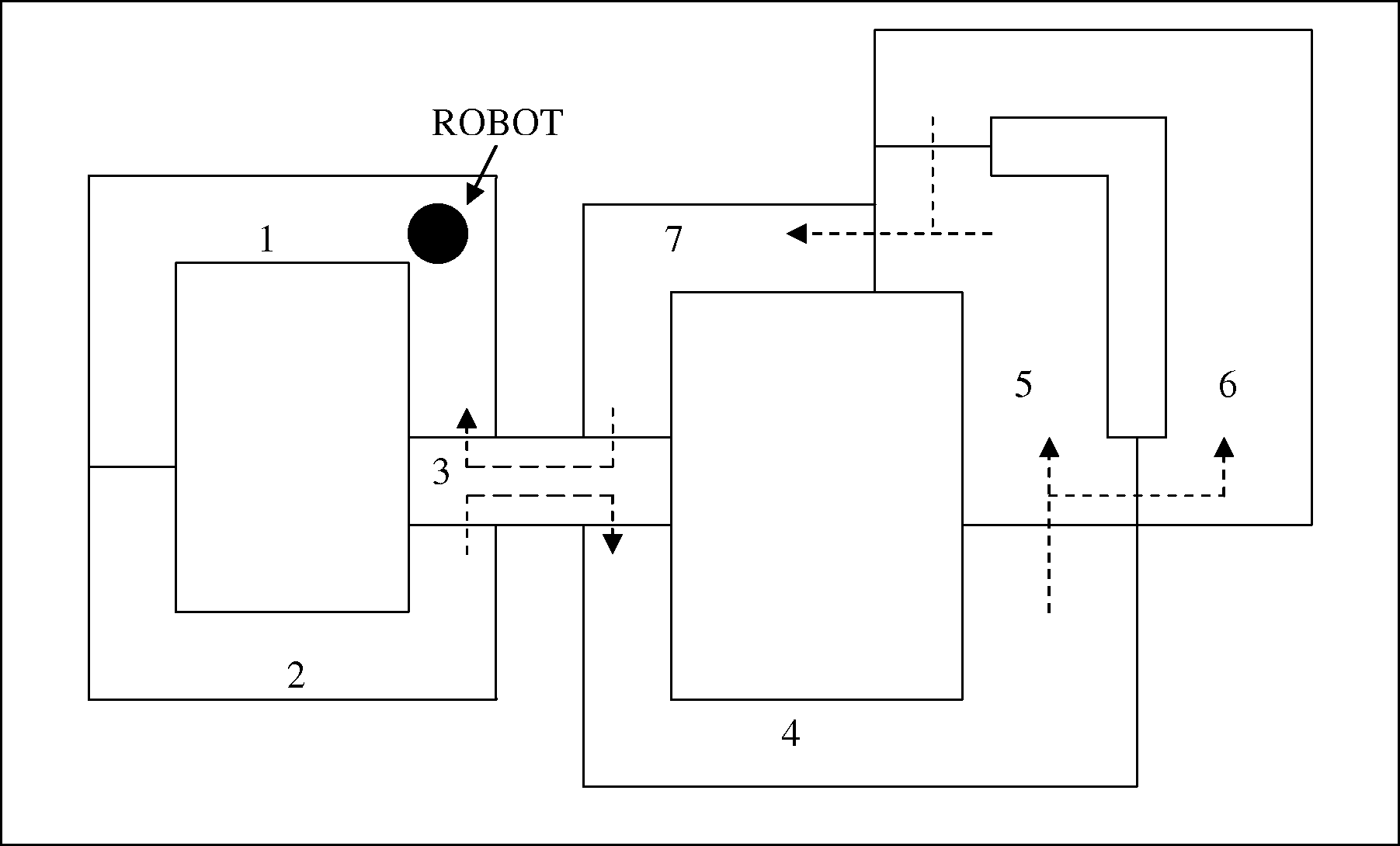
The corridors are divided into seven sectors. Sector 3 can be crossed in two directions 2-3-4 and 7-3-1. From sector 4 to sector 7 the robot can pass either through 5 or 6.
a) Model the problem of a single robot with a Petri net and describe in detail each place and transition represented.
b) Now assume that there are two robots. Specify a Petri net such that only one robot can access sector 3 at a time.
Draw only one diagram in each case and only 3 entries in each firing table.
|
Attachment: |
| Earning: Approval pending. |