Bengal Engineering and Science University 2007 B.E Electrical Engineering Control System-I - Question Paper
Ex/BESUS/ EE-603/07
B.E. (EE) Part-Ill 6th Semester Examination, 2007
Full Marks : 100
Time : 3 hours
Use separate answerscript for each half. Answer SIX questions, taking THREE from each half. Two marks are reserved for neatness in each half.
FIRST HALF
1. Answer all parts :
a) A system with zero initial conditions has a closed loop transfer function
T(s) =-
(s + l)(s + 4)
At which frequency is the output zero?
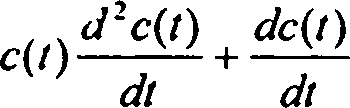
b) A system, whose output is x(t), is characterized by the following equation :
As f approaches infinity, what would be the value of x(0?
c) The transfer function of a system is given as : T(s) =-.
5 + 1
If this system is excited with an excitation, x(t) = sin(t), find the expression of the output y(t) at steady state.
d) The impulse response of a second order under-damped system having zero initial conditions is given by :
c(0 = 12e-31 sin At (for />0). What are the damping ratio and natural frequency of oscillation of the system? [3+3+6+4J
b) A physical S.I.S.O. system is characterized by the following equation :
/ --4 + 5 + 4 + cos 4t = 10w(/); where c (t) stands for response and dt1 dt2 dt
u(t) is unit step excitation. Comment on what type of system it is, with reasons.
c) Define transfer function of a system. What are meant by pole-zero form representation and time-constant form representation of a system transfer function? [5+3+8]
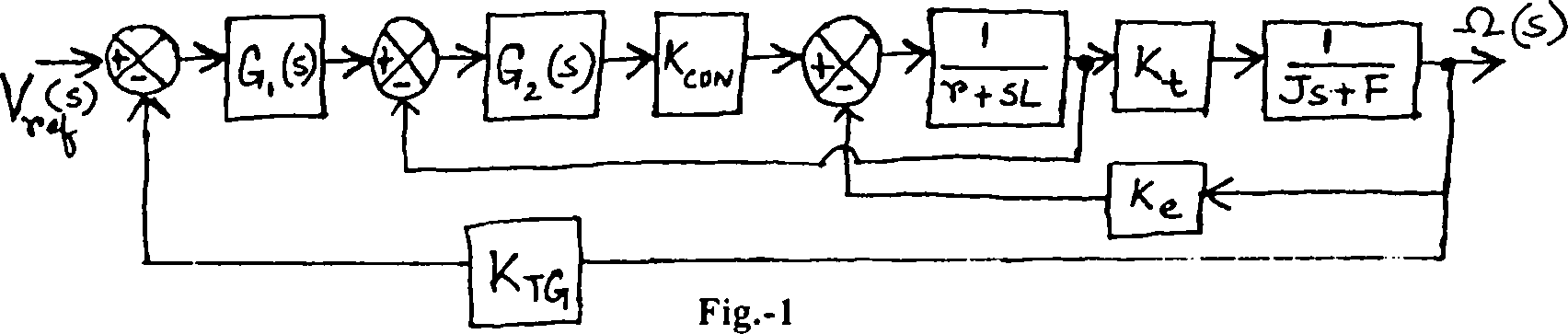
3. Find the transfer function of the system whose s-domain block diagram is given in Fig.-l (Consider Vref (s) as input and Q(s) as output of the system). |16]
4. Answer all parts :
a) Mention and explain the time domain specifications with reference to a second order system.
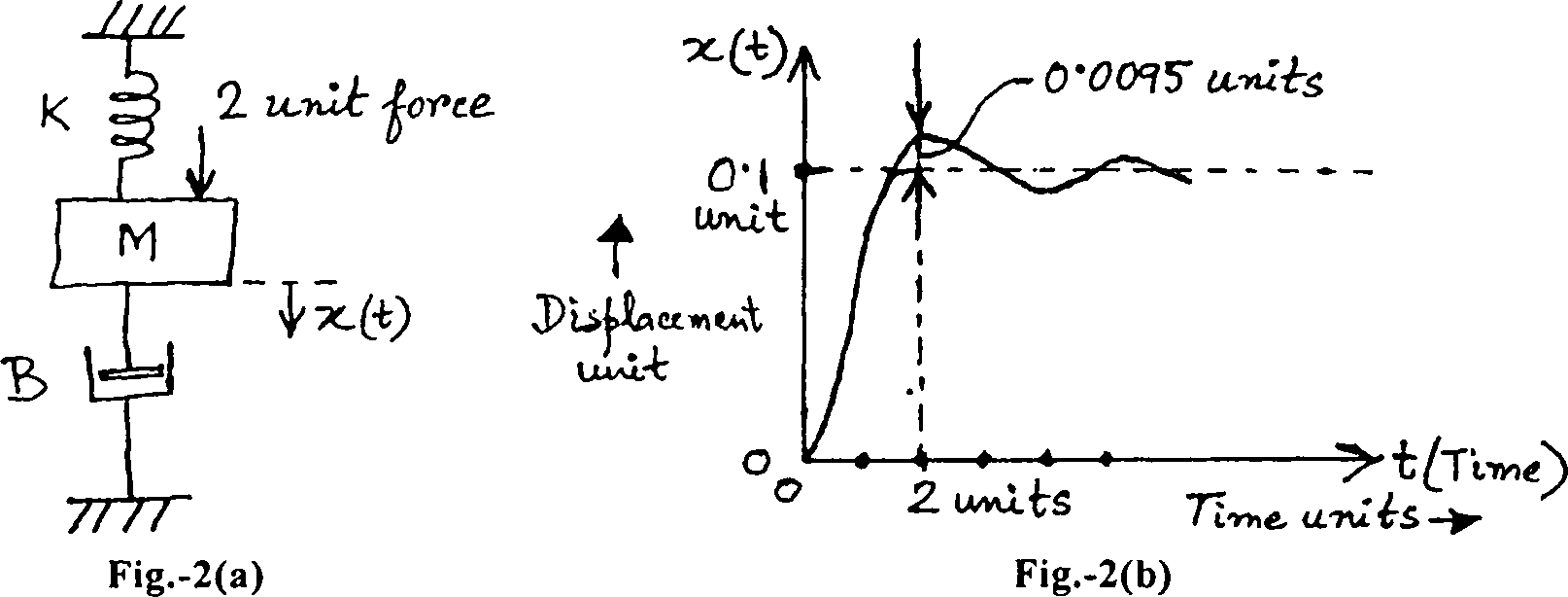
b) A mechanical vibratory mass-spring-dashpot system is shown in Fig.-2(a). When a 2 unit of force is suddenly applied to the system, the mass M oscillates, as shown in Fig.-2(b). Determine the numerical values of M, B and K of the system from the response curve. The displacement, x, is measured from the equilibrium position. Assume all variables are expressed in the same system of unit. [10+6]
5. Answer all parts :
a) Develop the transfer function of an armature-controlled DC servomotor with position as output and armature voltage as input. State all assumptions made.
b) Explain, why in a servomotor, a negative slope of the speed-torque characteristics is required.
|
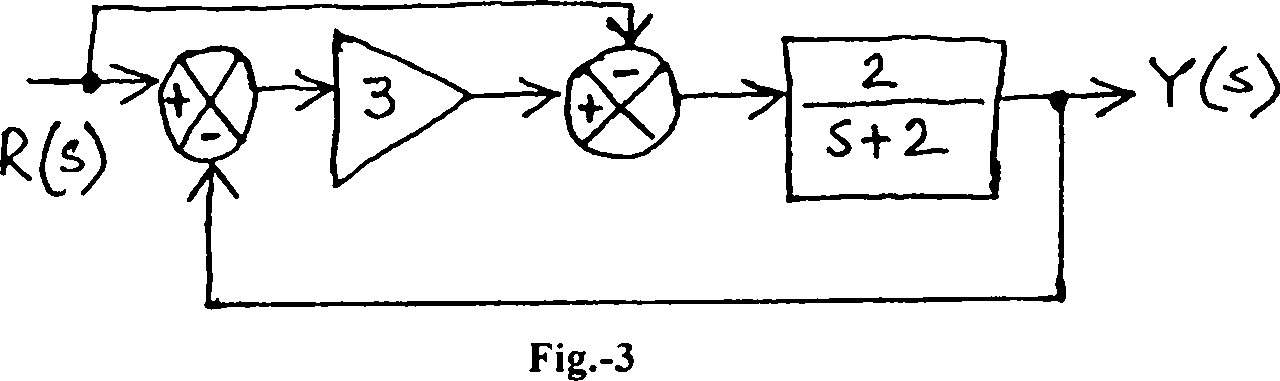
c) What will be the steady state error of the closed loop system shown in Fig.-3. [8+3+51 |
 |
SECOND HALF
6. a) Compare a closed loop system with an open loop one with examples.
b) Find range of K for stability for the unity feedback system with open loop transfer function :
(s + 2s + 10)
Determine the value of K that will cause sustained constant amplitude oscillations and also the frequency of oscillations.
c) Consider the unity feedback system with open loop transfer function :
K
with K= 5
G(s) =
s (s + 6.54)
find the resonance frequency and the resonance peak.
[4+8+4]
7. a) How does the synchro operate as an error detector? Derive expressions if
necessary.
b) Draw the Bode plots of: rM_ 1000 {S) s(s2+105 s + 600)
Also find the gain margin and phase margin. [6+l0|
8. a) When is a transfer function proper? When is it minimum phase?
b) Draw the complete root locus as 0 < a <co for the unity feedback system with 10 (s + a)(s + 3)
G(s) =
s(s2- 1)
Suitably assume positions of break-away point, exact location need not be found. [2+14]
9. a) How can you characterise relative stability?
b) Use Nyquist stability criterion to infer about closed loop stability of the unity feedback system with open loop transfer function :
%
G(s) = 20
s(l + 0.1s)(l + 0.5s)
c) Find Gain margin and phase crossover frequency. |4+10+2|
10. a) Describe the operation of a diode ring demodulation.
b) Explain which parts of the real axis in s-plane contain a root locus.
c) Draw the polar plot of the system given in 9(b).
d) For a second order system how can you correlate between time domain specifications and frequency domain specifications? [4+4+4+4J
Answer all parts :
a) What is meant by a S.I.S.O. system? A physical S.I.S.O. system is characterized by the following equation :
= 5(/); where c(t) stands for response and u(t) is unit step
excitation. Comment on what type of system it is, with reasons. Find the transfer function of the system.
|
Attachment: |
| Earning: Approval pending. |