B.Tech-B.Tech Electrical Engineering 6th Sem 6EE 1 Modern Control Theory 6E3109(Rajasthan Technical University-2012)
6E3109
B.Tech VI Sem. (Main/Back) Exam. April-May, 2012
Electrical Engg.
6EE 1 Modern Control Theory
Time: 3 Hours Maximum Marks: 80 Min. Passing Marks : 24
Unit-I
1 (a) Give the Condition of liner dependency over the field of Rational numbers of set of vectors. Also Explain how it is different from Real numbers. [10]
(b) Explain the Concept of Linear vector space Linear Independence. [6]
OR
1 (a) Given:-
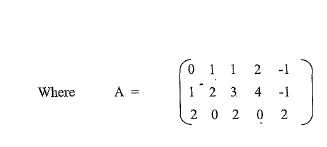
Find the Representation of x with respect to the basis [10]
{Y, XY, X2Y}
(b) Explain the Concept of Linearity and Causality. [6]
Unit- II
2 (a) A system is describe by the state equation
Using Laplace Transform Technique. Transform of state equation into a set of Liner equation in the from
(b) Explain the difference between Modern Control Theory and Conventional Control Theory [6]
OR
2 (a) Construct the state model for a system characterized by the differential equation [8]
(b) Explain the following terms:-
(i) State space equation [4]
(ii) State vector [4]
Unit-III
3 (a) A feed back system is characterized by the closed loop transfer function

Draw a suitable signal fliw graph and there form construct a state model of the system. [10]
(b) Derive state space representation using canonical variable's equation [6]
OR
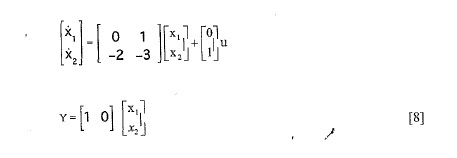
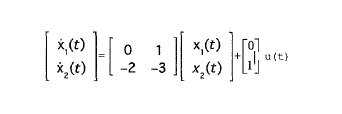
3 (a) For the state equation
3 (b) Derive and state the equation for Jordan canonical form [6]
Unit-IV
4 (a) What is State Transition Matrix ? State and derive the properties of state transition Matrix. [8]
(b) Explain the concept of controllability and observablity and compute these in corporate with State transition Matrix. [8]
OR
4 (a) State and Derive the Ackermari's formula for state equations [8]
4 (b) State and Derive the equations for pole placement by state feed back with nth order state model [8]
Unit-V
5 (a) Given
Z [x(k)] = x (z)
Find the z- transform of
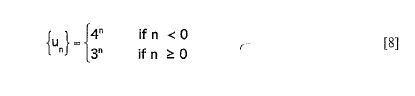
(b) Find the Z transform (Inverse) of the following - [8]

OR
5 (a) State and explain the initial and final value Theorem for Z-transform [8]
(b) Find the Z- domain transfer function of following S- Domain transfer functions - [8]

| Earning: ₹ 11.00/- |